 Spatial Intelligence and Physical AI for Autonomous Robot FleetsSectorRoboticsLocatedMalmö, SEStatusActiveContactstaer.ai
Spatial Intelligence and Physical AI for Autonomous Robot FleetsSectorRoboticsLocatedMalmö, SEStatusActiveContactstaer.aiStaer build the Physical AI infrastructure for autonomous mobile robots. Their platform provides shared spatial intelligence, real-time 3D mapping, and multi-vendor coordination, enabling robot fleets to see, navigate, and collaborate at scale.

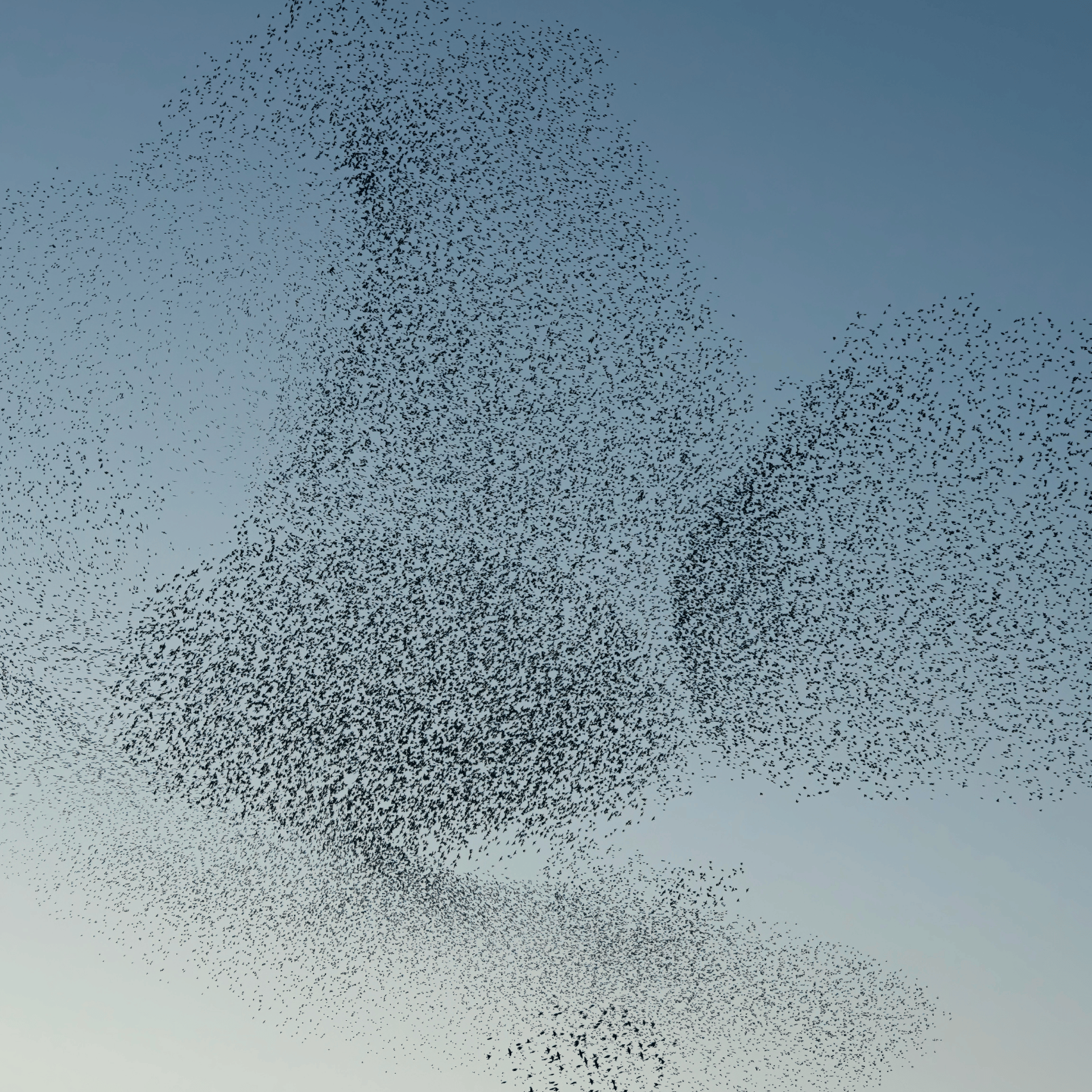
Physical AI for Autonomous Mobile Robots
Staer provide the spatial intelligence layer for the physical world, which enables autonomous robots to see, map, and reason together.
Their team previously built technologies powering Apple's Visual Positioning, Meta's Spatial Mapping, Room Scanning, SceneScript, and Neo4j's graph database infrastructure. Now they're applying that experience to robotics at a global scale, providing a unified spatial intelligence and coordination layer that works across any robot vendor and form factor.

Founders
Jan Erik Solem
Co-Founder & CEO
Carl Silbersky
Co-Founder

Johan Gyllenspetz
Co-Founder
Yubin Kuang
Co-Founder
Peter Neubauer
Co-Founder
Pau Gargallo
Co-Founder

 TangibleSectorFinanceLocatedLondon, UKStatusActive
TangibleSectorFinanceLocatedLondon, UKStatusActive PaebblSector Raw materialsLocatedStockholm, SEStatusActive
PaebblSector Raw materialsLocatedStockholm, SEStatusActive InfyosSectorSupply Chain Technology,LocatedLondon, UKStatusActive
InfyosSectorSupply Chain Technology,LocatedLondon, UKStatusActive